19 世紀和 20 世紀電力領域的科學迅速發展,這導致了感應電動機的誕生。在這些設備的幫助下,工業工業的發展向前邁進了一大步,現在無法想像沒有使用異步電動機的動力機器的工廠和工廠。
外觀歷史
異步電動機的創造歷史始於 1888 年,當時 尼古拉·特斯拉 同年,另一位電氣工程領域的科學家獲得了電動機電路的專利 伽利略費拉里斯 發表了一篇關於異步電機運行的理論方面的文章。
1889年俄國物理學家 米哈伊爾·奧西波維奇·多利沃-多布羅沃爾斯基 在德國獲得了異步三相電動機的專利。

所有這些發明都使改進電機成為可能,並導致電機在工業中的大量使用,從而顯著加快了生產中的所有工藝流程,提高了工作效率,降低了勞動強度。
目前,工業中最常用的電動機是 Dolivo-Dobrovolsky 製造的電動機原型。
異步電動機的裝置和工作原理
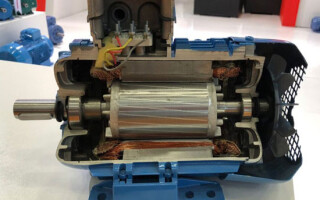
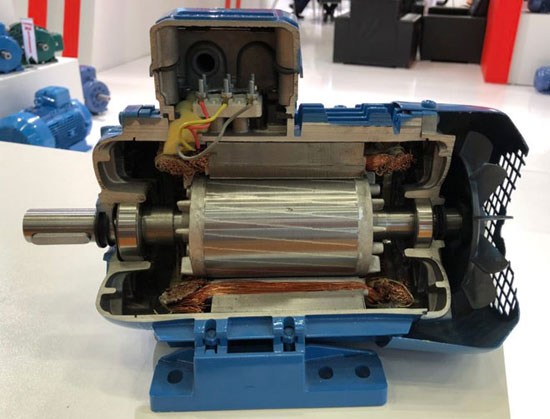
感應電動機的主要部件是定子和轉子,它們通過氣隙相互隔開。發動機中的主動功由轉子的繞組和鐵芯完成。
發動機的異步性被理解為轉子速度與電磁場旋轉頻率之間的差異。
定子 - 這是發動機的固定部分,其核心由電工鋼製成並安裝在框架中。床是由非磁性材料以鑄造方式製成的(鑄鐵, 鋁)。定子繞組是一個三相繫統,其中導線鋪設在偏轉角為 120 度的凹槽中。繞組的相位根據“星形”或“三角形”方案標準地連接到網絡。

轉子 它是發動機的運動部件。異步電動機的轉子有兩種類型:鼠籠式轉子和相轉子。這些類型在轉子繞組的設計上彼此不同。
異步鼠籠式電機
這種類型的電機首先由 M.O. 獲得專利。 Dolivo-Dobrovolsky,通常被稱為 “松鼠輪” 由於結構的外觀。短路轉子繞組由用環短接的銅棒組成(鋁, 黃銅) 並插入轉子鐵芯繞組的凹槽中。這種類型的轉子沒有動觸點,因此這些電機運行非常可靠和耐用。
帶相轉子的感應電動機
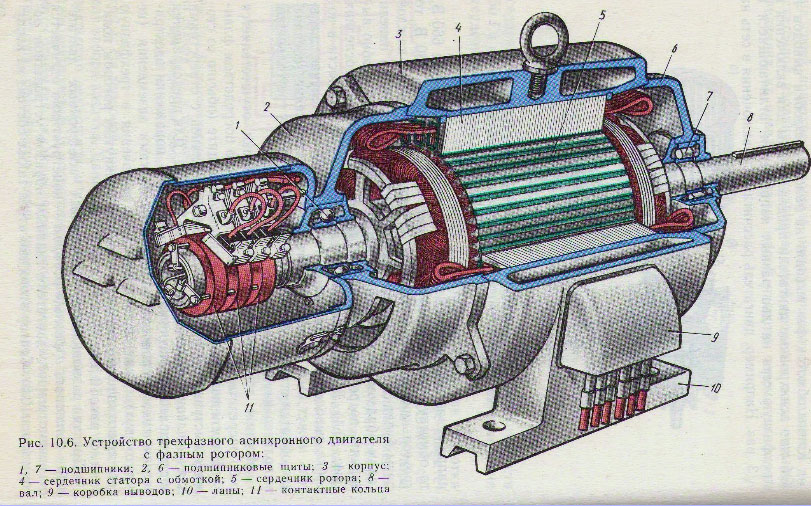
這樣的設備使您可以在很寬的範圍內調整工作速度。相轉子是一個三相繞組,按“星形”或三角形方案連接。在這種電動機中,設計中有特殊的刷子,您可以使用它們來調節轉子的速度。如果在這種發動機的機構中增加一個特殊的變阻器,那麼當發動機啟動時,有源電阻會降低,從而啟動電流會降低,這會對電網和設備本身產生不利影響。
工作原理
當電流施加到定子繞組時,會產生磁通量。由於相位相對於彼此偏移120度,因此,繞組中的流動旋轉。如果轉子短路,那麼隨著這種旋轉,轉子中會出現電流,從而產生電磁場。轉子和定子的磁場相互作用,使電動機的轉子旋轉。如果轉子是同相的,那麼電壓會同時施加到定子和轉子上,每個機構中都會出現磁場,它們相互作用並旋轉轉子。
異步電機的優點
| 帶鼠籠式轉子 | 帶相位轉子 |
|---|---|
| 1.簡單的裝置和發射電路 | 1.啟動電流小 |
| 2. 製造成本低 | 2.能夠調整旋轉速度 |
| 3.隨著負載的增加,軸速不變 | 3.在不改變速度的情況下處理小過載 |
| 4.能夠承受短期過載 | 4.可應用自動啟動 |
| 5.運行可靠耐用 | 5、扭矩大 |
| 6.適用於所有工作條件 | |
| 7.具有高效率 |
異步電動機的缺點
| 帶鼠籠式轉子 | 帶相位轉子 |
|---|---|
| 1.轉子轉速不可調 | 1. 大尺寸 |
| 2.啟動扭矩小 | 2.效率較低 |
| 3.啟動電流大 | 3、刷子磨損導致頻繁維護 |
| 4. 一些設計複雜性和移動觸點的存在 |
異步電機是非常高效的設備,具有出色的機械特性,這使其在使用頻率方面處於領先地位。
操作模式

異步電動機是一種通用機構,在運行期間有多種模式:
- 連續的;
- 短期;
- 定期;
- 重複-短期;
- 特別的。
連續模式 - 異步設備的主要操作模式,其特點是電動機在恆定負載下持續運行而不會停機。這種經營方式最為普遍,在工業企業中到處使用。
瞬時模式 - 工作直到達到恆定負載一段時間(10 到 90 分鐘),沒有時間盡可能地熱身。之後它會關閉。此模式用於提供工作物質(水、油、氣) 和其他情況。
週期性模式 - 工作持續時間具有一定的價值,並在工作循環結束時關閉。工作模式啟動-工作-停止。同時,它可以關閉一段時間,在此期間它沒有時間冷卻到外部溫度並再次打開。
間歇模式 - 發動機沒有加熱到最大,也沒有時間冷卻到外部溫度。用於電梯、自動扶梯等設備。
特別制度 - 包含的持續時間和期限是任意的。
在電氣工程中,有一個電機可逆性原理——這意味著該設備既可以將電能轉換為機械能,又可以執行相反的動作。
異步電動機也符合這一原理,並具有電動機和發電機的運行模式。
電機模式 - 異步電動機的主要運行模式。當電壓施加到繞組上時,會產生電磁轉矩,帶動轉子與軸一起旋轉,從而軸開始旋轉,發動機達到恆定轉速,做有用功。
發電機模式 - 基於在轉子旋轉期間在電機繞組中激發電流的原理。如果電機轉子機械旋轉,則在定子繞組上形成電動勢,在繞組中存在電容器的情況下,會出現電容電流。如果電容器的電容量為一定值,則根據發動機的特性,發電機會自勵,出現三相電壓系統。因此,鼠籠式電動機將用作發電機。
異步電動機的速度控制
為了調節異步電動機的轉速並控制其運行模式,有以下方法:
- 頻率——當電網中電流的頻率發生變化時,電動機的轉動頻率就會發生變化。對於這種方法,使用了一種稱為變頻器的設備;
- 變阻器——當轉子中變阻器的電阻發生變化時,轉速就會發生變化。這種方法增加了啟動扭矩和臨界滑差;
- 脈衝 - 一種將特殊類型的電壓施加到電機的控制方法。
- 在電動機運行期間將繞組從“星形”電路切換到“三角形”電路,從而降低啟動電流;
- 鼠籠式轉子極對變化控制;
- 繞線轉子電機的感抗連接。
隨著電子系統的發展,各種異步電動機的控制變得更加高效和準確。這種引擎在世界各地都在使用,這種機制執行的任務每天都在增加,而且對它們的需求並沒有減少。
類似文章: